光机LBS原理
2024-05-22
虚像距离VID(上)介绍了VID的定义和取舍。在取舍部分,我们谈到:对于AR-HUD来说,较短VID及较远的待标识物体会导致驾驶员眼睛的频繁变焦,带来疲惫和眩晕感[1];此外,较短的VID还会带来虚实图像的贴合错位[1]。因而,AR-HUD产品需要匹配较长的VID,通常会做到7m~10m,再长一些有10m~15m[2]。但长距离的VID也存在一定弊端,本期文章将着重进行介绍。
长距离VID的弊端
(1)体积增大
在虚像距离VID(上)我们介绍过,VID和系统光学距离(两块镜片之间的距离+小镜片与PGU之间的距离)有关。也就是说,如果想要把VID做得很长,同时保证图像的质量,需要增加系统光学距离,而距离的增加会导致HUD的整体体积增大[3]。例如,对比通常只有3~6升的传统W-HUD, 长VID的AR-HUD体积会在10升左右,甚至可达20升。由于车内仪表板背后空间狭小,AR-HUD的大体积也成为了限制其应用的原因之一[3]。
(2)光学设计挑战
长距离VID通常会导致放大倍率增大,而这又会造成以下两个问题:其一是光学设计挑战,其二是阳光倒灌。放大倍率是指物体经透镜放大后,人眼所观察到的最终图像大小与原物体大小的比值[4]。在HUD中,如果我们用L表示虚像的成像大小,P表示像源(PGU)的大小,则镜片的放大倍率M可以通过以下公式计算呈现:
而其中的虚像大小L,又是由FOV和VID共同决定的:
![]()
结合上述两个公式可得,HUD镜片的放大倍率为:
![]()
通常,在设计HUD时,FOV是一个定值,根据车辆的性能要求和安装空间确定(详见视场角FOV的原理及应用)。而像源(P)通常也是定值,大小取决于光机(PGU)。也就是说,在FOV和PGU为定值的情况下,HUD镜片的放大倍率(M)和VID成正相关,VID越长,放大倍率也越大。
HUD系统的放大倍率越大,HUD的设计要求也就越高[5]。拿HUD的动态畸变来说,当HUD的PGU为3.1寸TFT,VID为2.5米,HUD的放大倍率约5~7倍,在设计HUD光路时,会将动态畸变控制在2mrad以下;当VID增大到7.5米时,HUD的放大倍率是15~20倍,约为前者的三倍;此时我们仍然需要将动态畸变控制在2mrad以下,但放大倍率的增大,动态畸变的控制将更难[6]。此外,高放大倍率下,对于HUD系统的公差要求也更加严格。
(3)阳光倒灌
长距离VID带来的另外一个问题是阳光倒灌,阳光倒灌会引发PGU升温失效,进而导致HUD失效[7]。由于光路是可逆的,高放大倍率导致了等量的阳光在通过自由曲面反射到PGU时,承接等量能量的面积减少,也就是PGU上能量聚集点接收的能量密度大幅增高。
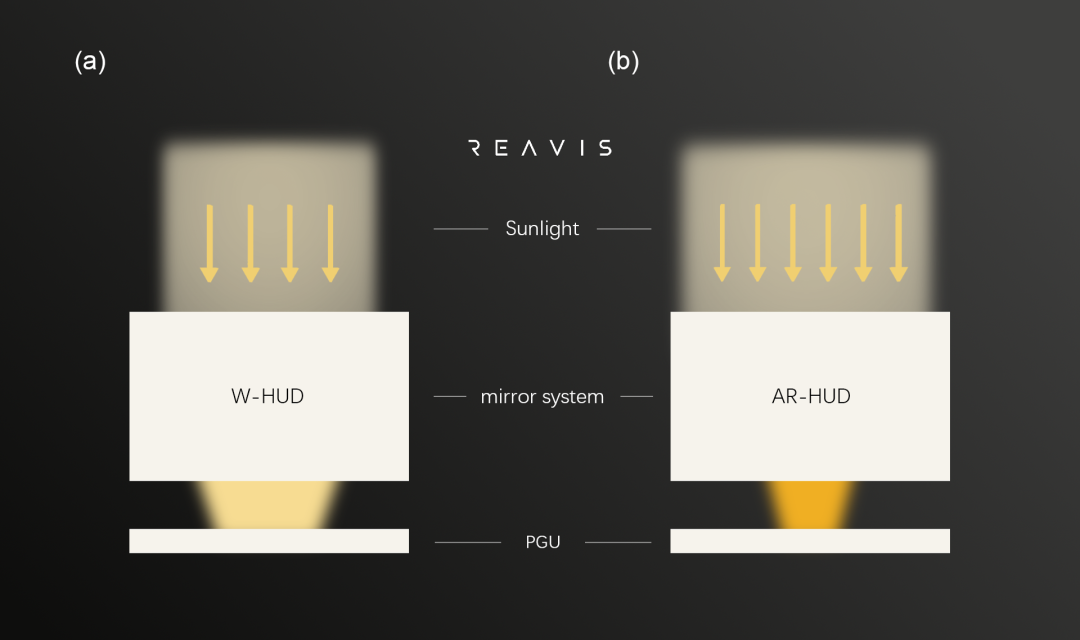
同时,一般而言,更长的VID也意味着需要更大的镜片来实现,这意味着更多的阳光将被更大的镜片反射到HUD内部[8]。综合来看,这两个因素的叠加导致一个高密度的能量点汇集在PGU上,如同放大镜点燃火柴一样,聚集了HUD接收的所有热量, 迅速导致PGU温度升高,进而造成HUD失效。图(1)为我们展示了短VID的W-HUD(图(1)(a))和长VID的情况(图(1)(b))下,阳光照射进HUD内部的简化示意图。
合适的VID
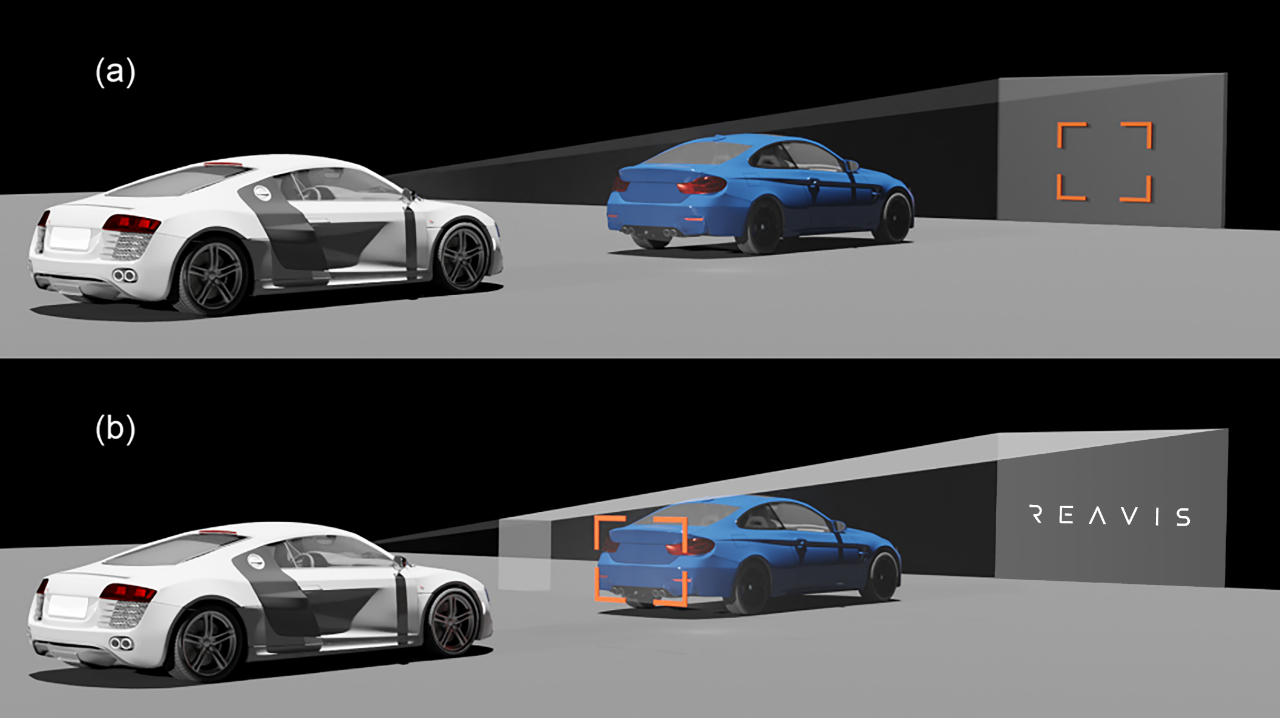
到目前为止,我们讨论的VID只有一个定值,也就是HUD只有一个成像焦平面,也称单焦面HUD。由于虚像只能限制在一个固定距离的平面上,单焦面投射注定会导致单一固定距离的虚像和全纵深现实场景之间的距离差。这种距离差使得人眼需要在虚像和实景间持续切换变焦,从而影响驾驶体验。如图(2)所示,单焦面下HUD真实投射的场景(图(2)(a))和理想环境下虚实贴合的状态(图(2)(b))之间依旧存在一定差距。
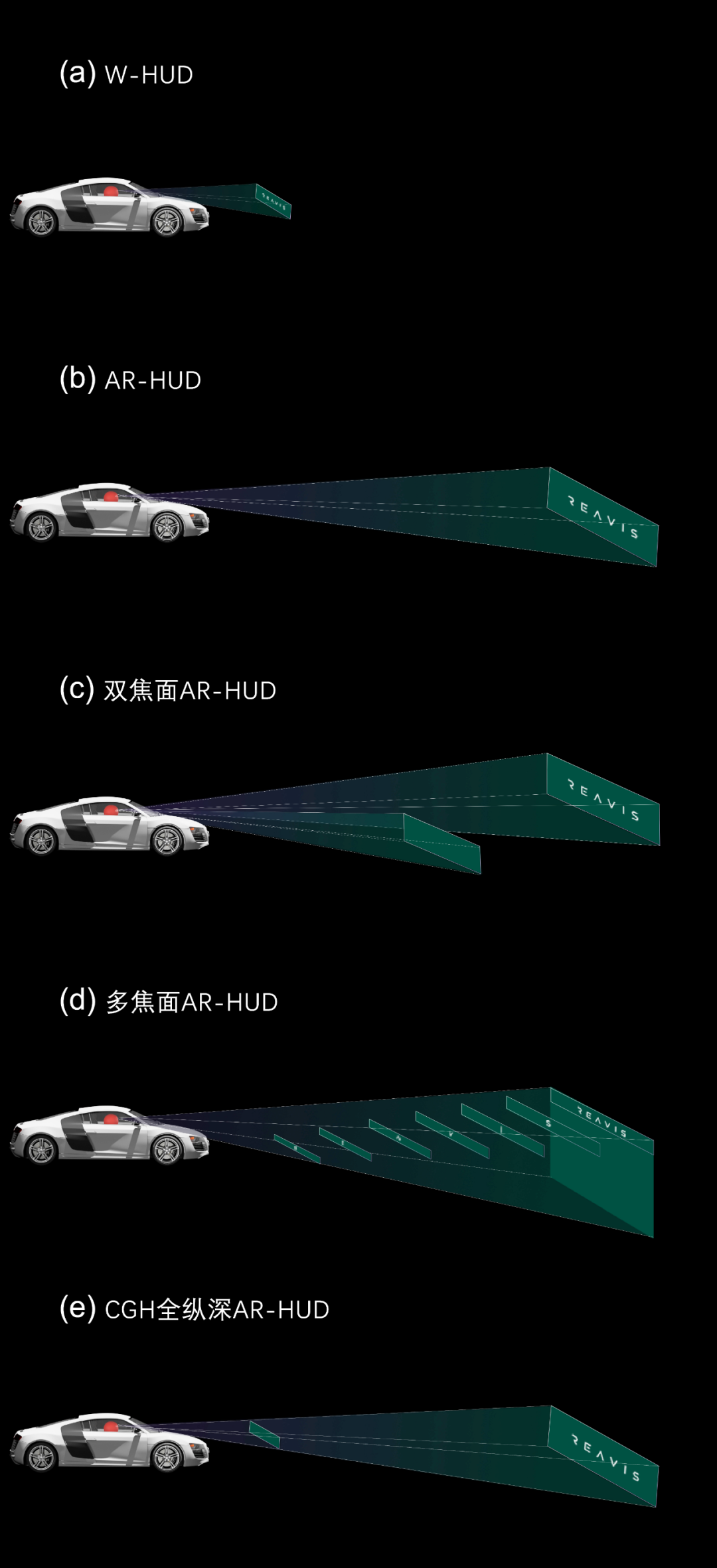
市面上部分量产的AR-HUD会采用双焦面的系统(图(3)(c))。常见的双焦面AR-HUD会设置一个FOV较小、VID较短的投影面来显示W-HUD的内容(行车信息等),和一个FOV较大、VID较远的投影面,用于显示AR的内容(导航、行车或者行人的标识等)。这个设计通常是通过双光机双光路,或者单光机双光路来实现的[9],主要是为了平衡持续显示(W-HUD内容)和间断显示(AR内容)的VID。但采用双焦面方案时,AR内容的虚像和现实场景的距离差依旧存在。为了解决这一问题,即更好地实现HUD虚像与现实场景的融合,3D AR-HUD应运而生。
3D AR-HUD有多种实现方式,比如多焦面方法(图(3)(d))是通过传统几何光学,设置多个VID,在这些固定距离的投影面上显示图像[9]。而如果要实现全纵深连续变焦的投影(图(3)(e)),则可依赖数字计算全息技术(CGH),使用LCoS相位调变技术,实现全纵深的投影。睿维视在3D成像技术上有多年的布局,正在开展CGH 3D AR-HUD的产品研发,同时将于近期推出量产级多焦面MF(Multi-Focal) 3D AR-HUD产品。
综合这两期,VID是虚像显示设备的重要光学参数之一。VID过短,不利于AR-HUD的观察效果和AR内容贴合,但VID过长,会造成HUD设备的体积增加,设计制造难度上升,且会有阳光倒灌的风险。而最为理想的AR-HUD应是有多个焦面的3D AR-HUD。
#参考来源:
[1]TEXAS INSTRUMENTS. (2022). "The Importance of a Longer VID for AR HUDs". Technical White Paper
[2]Firth, M. (2019). "Introduction to automotive augmented reality head-up displays using TI DLP® technology". Technical document, May.
[3]Howells,P.J., Brown,R. (2007). "Challenges with displaying enhanced and synthetic vision video on a head-up display". In Enhanced and Synthetic Vision 2007 (Vol. 6559, pp. 155-164). SPIE.
[4]Rekimoto, Jun. (1995). "The magnifying glass approach to augmented reality systems." International Conference on Artificial Reality and Tele-Existence. Vol. 95.
[5]Rankin A, Thompson J. (2015). "Next‐Generation Head‐Up Displays". Information Display, 31(3): 18-21.
[6]Li, Ke, et al. (2020). "Distortion correction algorithm of ar-hud virtual image based on neural network model of spatial continuous mapping." IEEE International Symposium on Mixed and Augmented Reality Adjunct (ISMAR-Adjunct).
[7]Li Z, Zhou X, Zheng YS. (2017). “Design and Research of Vehicle Driving Auxiliary System Based on AR-HUD”. Journal of wuhan university of technology, 41 (6), 924 –928.
[8]Firth, Mike. (2019). "Introduction to automotive augmented reality head-up displays using TI DLP® technology." Technical document, May.
[9]Zhan T, Xiong J, Zou J, Wu ST. (2020). "Multifocal displays: review and prospect". PhotoniX, 1(1), 1-31.
